ROS for MM
ROS for MM
Introduction
Installing and Configuring Your ROS Environment
Understanding the ROS file system level
Writing a simple publisher and subscriber (python)
Topic, Service and Actionlib
Topic with ROS custom messages
ROS Coding.1.Robot Simulation အတြက္ Robot Model အား စတင္တည္ေဆာက္ျခင္း
ROS Coding.1.1.myrobot1.urdf ရွင္းလင္းခ်က္မ်ား
ROS Coding.1.2.myrobot1.urdf အား RVIZ တြင္ launch ျပဳလုပ္ျခင္း
ROS Coding.2.Robot Model အား Keyboard မွတဆင့္ ခိုင္းေစနိုင္ရန္အတြက္ Node တစ္ခုဖန္တီးျခင္း
ROS Coding.3.Robot Model အတြက္ Moving Forward Program တစ္ခုေရးသားျခင္း
ROS Coding.3.1.Moving Forward and Backward
ROS Coding.3.2.Moving Square Using Odometry
ROS Coding.4.Moving with Move Base
ROS Arduino.1. Arduino IDE Setup For ROS
ROS Arduino.2.Hello World (Example Publisher)
ROS Arduino.3. Creating custom messages for ROS Arduino
ROS Arduino.4. Blink (example subscriber)
ROS Arduino.5. Servo Pan and Tilt Control
ROS Arduino.6. Reading distance with ultrasonic sensor
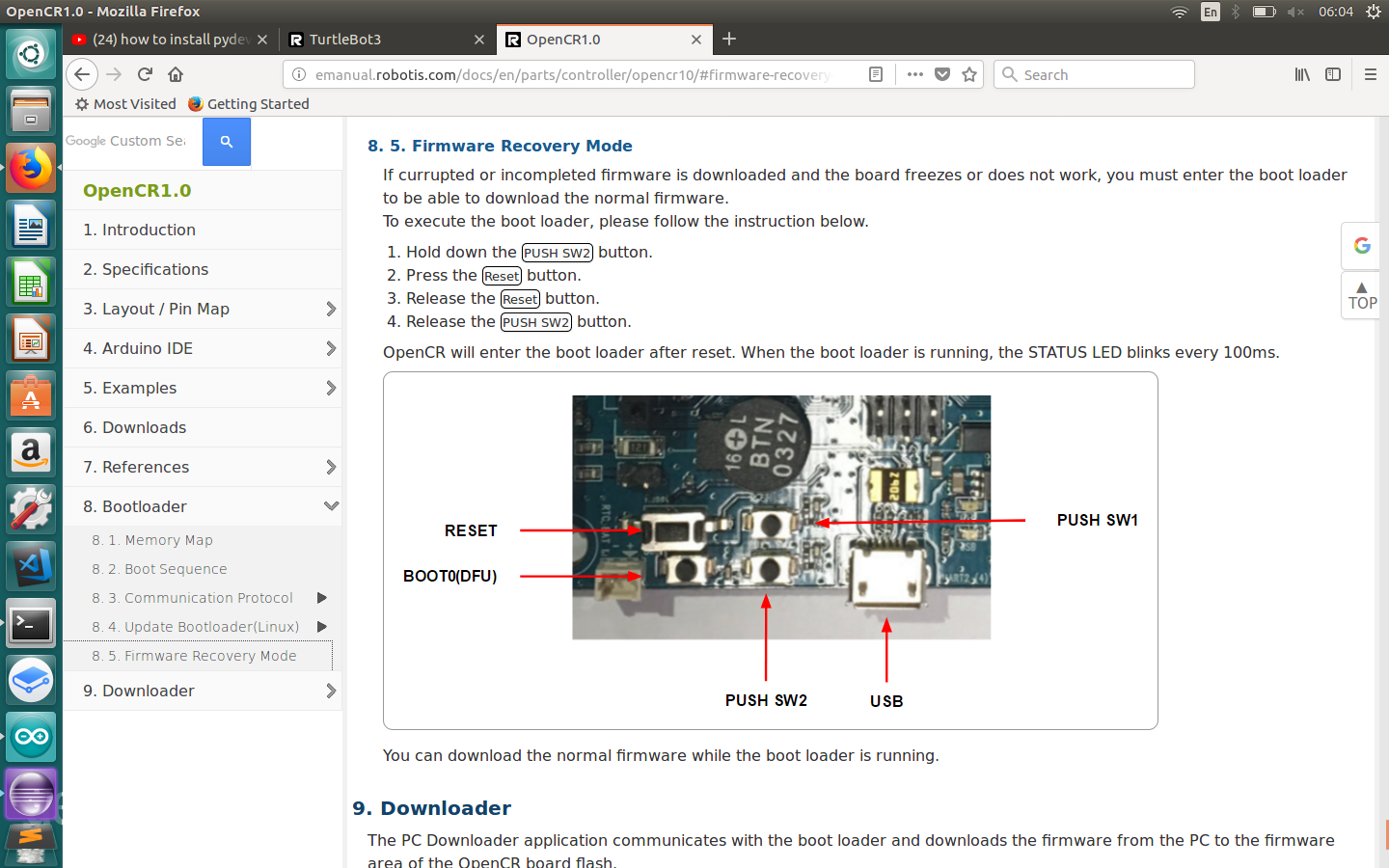
OpenCR_recovery
Powered by
GitBook
OpenCR_recovery
results matching "
"
No results matching "
"