ROS Coding.3.Robot Model အတြက္ Moving Forward Program တစ္ခုေရးသားျခင္း
အရင္ post မွာကေတာ့ robot model ကို keyboard ကေနတဆင့္ ခိုင္းေစခဲ့ပါတယ္။ ကြ်န္ေတာ္က theory နဲ႕ေရာခ်ျပီး keyboard ကေန တဆင့္ခိုင္းေစနိုင္ဖို႕ ၾကားခံ node တစ္ခုေရးတာကို ရွင္းျပခဲ့ပါတယ္။ ros မွာ robot ေတြရဲ႕ ေရြ႕လ်ားမွဳကို Twist ဆိုတဲ့ message ကေန တဆင့္ခိုင္းေစပါတယ္။ Twist မွာ ဘာေတြပါလဲဆိုတာကို ေအာက္ပါ command ကေနတဆင့္ၾကည့္ပါမယ္။
rosmsg show Twist
Twist msg မွာပါတဲ့ data type ေတြကို ေအာက္ပါအတိုင္းေဖာ္ျပေပးပါတယ္။
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
အေရွ႕ tutorial မွာ ေရးခဲ့တဲ့ node က ဒီ twist msg data ကို subscribe လုပ္ေနတာျဖစ္ပါတယ္။ subscribe လုပ္ျပီး base_link နဲ႕ odom frame နွစ္ခုကို အျမဲ translation လုပ္ျပီးျပေပးေနတာျဖစ္ပါတယ္။ ဒီမွာေတာ့ twist msg ကို program ကေန ထုတ္ေပးျပီး robot အတြက္ forward program တစ္ခုကိုေရးၾကည့္ရေအာင္။ myrobot1/src ထဲမွာ forward.cpp ဆိုတဲ့ ဖိုင္တစ္ခုကိုဖန္တီးျပီး ေအာက္ပါ code ေတြကို ကူးထည့္ပါမယ္။
#include <ros/ros.h>
#include <std_msgs/String.h>
#include <geometry_msgs/Twist.h>
#include <sstream>
int main(int argc, char** argv)
{
ros::init(argc,argv,"forward");
ros::NodeHandle n;
ros::Publisher pub=n.advertise<geometry_msgs::Twist>("cmd_vel",10);
int rate=10;
float linear_velocity=0.2;
float goal_distance=1.0;
float time_duration;
int ticks;
time_duration=goal_distance/linear_velocity;
ticks=rate*time_duration;
geometry_msgs::Twist move_cmd;
move_cmd.linear.x=linear_velocity;
ros::Rate r(rate);
for(int i=0;i<ticks;i++)
{
pub.publish(move_cmd);
r.sleep();
}
move_cmd.linear.x=0.0;
pub.publish(move_cmd);
ros::Duration(1).sleep();
}
ros::init(argc,argv,"forward");
ros::NodeHandle n;
ros::Publisher pub=n.advertise<geometry_msgs::Twist>("cmd_vel",10);
node နာမည္ကိုေတာ့ forward ဆုိတဲ့ name နဲ႕ initialize လုပ္လိုက္ပါတယ္။ topic ေတြကို publish လုပ္မွာျဖစ္တဲ့အတြက္ pub ဆုိတဲ့ publisher တစ္ခုကိုလည္း ဖန္တီးထားပါတယ္။
float linear_velocity=0.2;
float goal_distance=1.0;
float time_duration;
ဒီမွာေတာ့ linear_velocity တန္ဖိုးနဲ႕ goal_distance တန္ဖိုးကို သတ္မွတ္ေပးထားပါတယ္။
time_duration=goal_distance/linear_velocity;
ticks=rate*time_duration;
time_duration ကိုေတာ့ v=m/s ဆိုတဲ့ပံုေသနည္းကို တြက္ျပီးယူထားတယ္။ goal_distance 1 m ကို velocity 0.2 m/s နဲ႕သြားရင္ ဘယ္ေလာက္ၾကာၾကာသြားရမလဲေပါ့ဗ်ာ။ ticks တန္ဖိုးကို တြက္ယူထားတာက publisher သည္ frequency တစ္ခါခုန္တိုင္း တစ္ၾကိမ္ publish လုပ္ပါတယ္။ ဒီမွာ ကြ်န္ေတာ္တို႕က frequecy ကို ၁၀ လို႕ေပးထားေတာ့ 1 second ကို ဆယ္ၾကိမ္ publish လုပ္ပါလိမ့္မယ္။ တြက္လို႕ရတဲ့တန္ဖိုးက 5 second ဆုိေတာ့ အၾကိမ္ ၅၀ မျပည့္မခ်င္း publish လုပ္ေပးေနပါလိမ့္မယ္။ ေရးျပီးတာနဲ႕ executable ဖိုင္ရဖို႕အတြက္ကို CMakeLists.txt ထဲမွာ ေအာက္ပါစာသား ၂ ေၾကာင္းကို သြားျဖည့္ျပီး compile လုပ္လိုက္ပါမယ္။
add_executable(forward src/forward.cpp)
target_link_libraries(forward ${catkin_LIBRARIES})
python နဲ႕လည္း ေရးထားေပးပါတယ္။
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
from geometry_msgs.msg import Twist
class Forward():
def __init__(self):
rospy.init_node('forward',anonymous=True)
self.pub=rospy.Publisher('cmd_vel',Twist,queue_size=10)
rate=10
r=rospy.Rate(rate)
linear_velocity=0.2
goal_distance=1
time_duration=goal_distance/linear_velocity
move_cmd=Twist()
move_cmd.linear.x=linear_velocity
ticks=int(rate*time_duration)
for t in range(ticks):
self.pub.publish(move_cmd)
r.sleep()
move_cmd=Twist()
self.pub.publish(move_cmd)
rospy.sleep(1)
if __name__=='__main__':
try:
Forward()
except rospy.ROSInterruptException:
rospy.loginfo("shutdown")
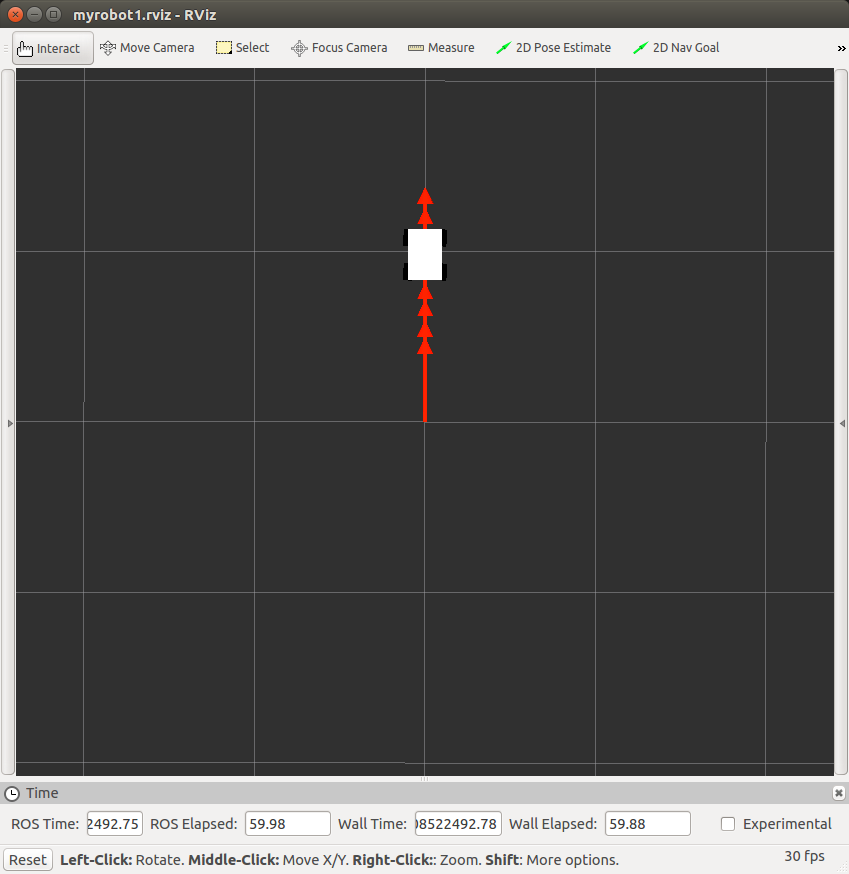
run ၾကည့္လိုက္ရင္ေတာ့ ေအာက္ပါပံုအတိုင္း ျမင္ရပါလိမ့္မယ္။